
Zhuoxiao (Ivan) Chen
[陈卓潇]
Welcome to my personal website! I’m a Senior Research Scientist at MongoDB, working with Dr Robin Vujanic. I was an AI Scientist Intern in 2025 at Oracle Health and AI (OHAI), supervised by Prof Yuan-Fang Li, where I developed large vision–language models tailored to healthcare data. I received my PhD in 2026 from The University of Queensland (UQ), Australia, under the supervision of Dr Yadan Luo, Prof Helen Huang, and Dr Mahsa Baktashmotlagh. My research focused on improving model generalization for 3D scene understanding. I received my Bachelor of Computer Science with First Class Honours from UQ in 2021, and had the honor of serving as Valedictorian at the December 2021 graduation ceremony.
Email: zhuoxiao [dot] chen [at] uq [dot] edu [dot] auGoogle Scholar / GitHub / DBLP / IG
Publication
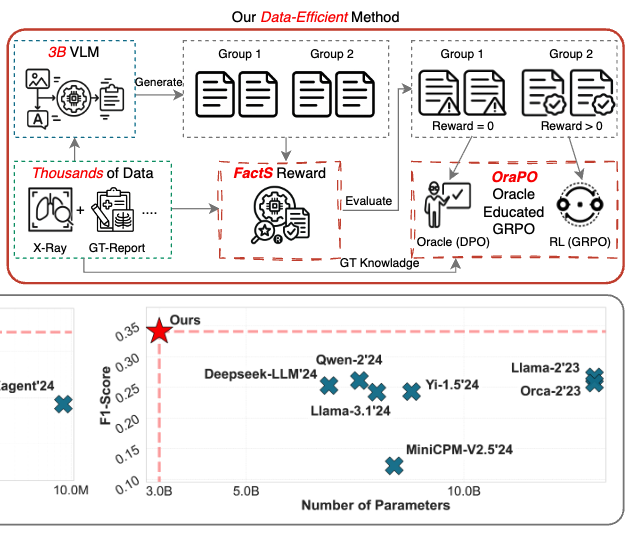
OraPO: Oracle-educated Reinforcement Learning for Data-efficient and Factual Radiology Report Generation
Zhuoxiao Chen, Hongyang Yu, Ying Xu, Yadan Luo, Long Duong, Yuan-Fang Li
CVPR 2026
[arXiv]
In this paper, we propose Oracle-educated GRPO (OraPO) with a FactScore-based reward (FactS) to tackle the radiology report generation (RRG task) under constrained budgets.
OraPO enables single-stage, RL-only training by converting failed GRPO explorations on rare or difficult studies into direct preference supervision via a
lightweight oracle step. FactS grounds learning in diagnostic evidence by extracting atomic clinical facts and checking entailment against ground-truth labels,
yielding dense, interpretable sentence-level rewards.
Together, OraPO and FactS create a compact and powerful framework that significantly improves learning efficiency on clinically challenging cases,
setting the new SOTA performance on the CheXpert Plus dataset (0.341 in F1) with 2--3 orders of magnitude less training data using a small base VLM on modest hardware.
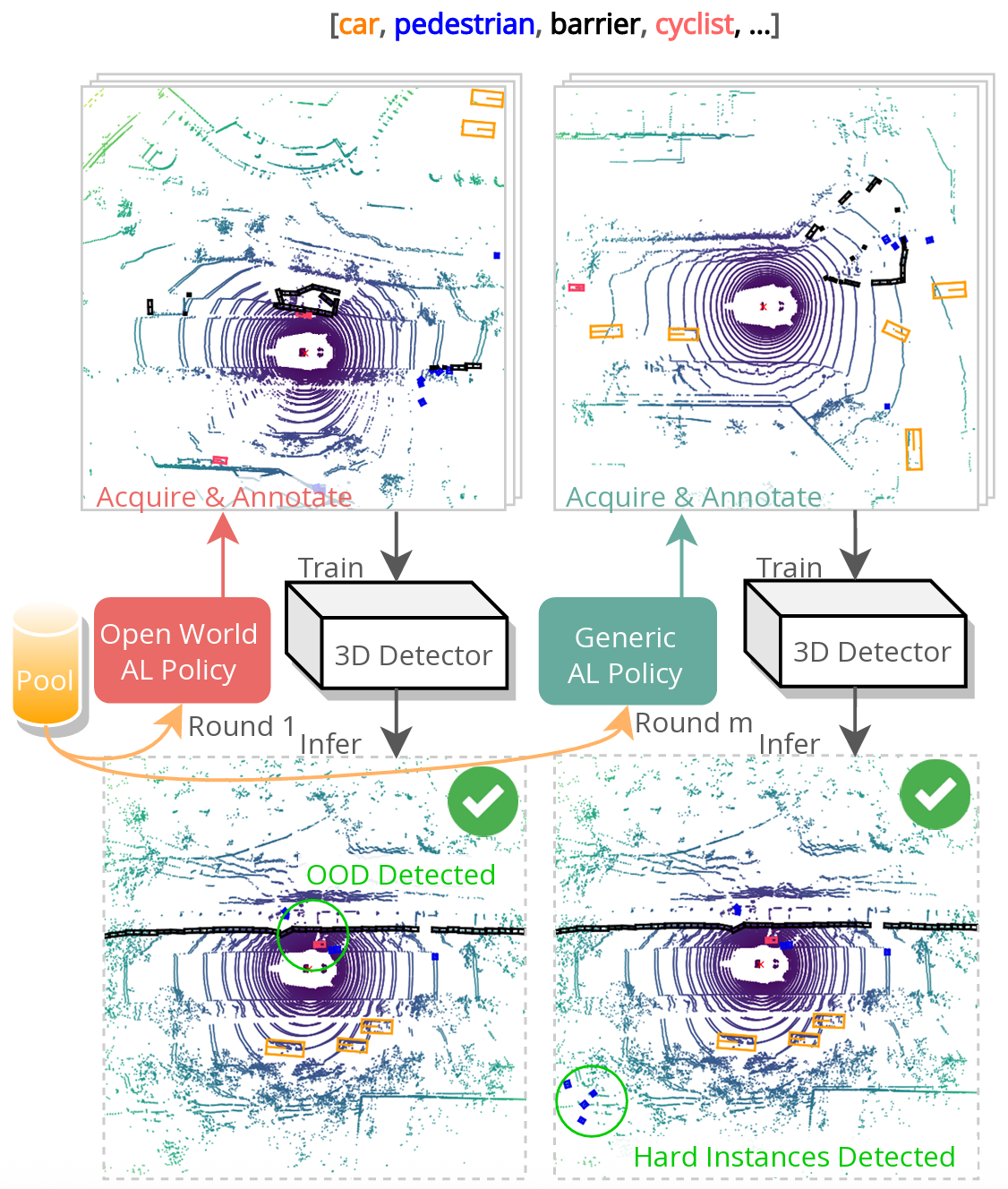
Open-CRB: Active Learning for 3D Object Detection from Open World
Zhuoxiao Chen, Yadan Luo, Zixin Wang, Zijian Wang, Zi Huang
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI) 2025
[paper]
[arXiv]
[code]
This paper investigates a more practical and challenging research task:
Open World Active Learning for 3D Object Detection (OWAL-3D), aimed at acquiring informative point clouds with new concepts.
We propose a simple yet effective strategy called Open Label Conciseness (OLC),
which mines novel 3D objects with minimal annotation costs. Our empirical results show that OLC successfully adapts
the 3D detection model to the open world scenario with just a single round of selection.
Any generic AL policy can then be integrated with the proposed OLC to efficiently address the OWAL-3D problem.
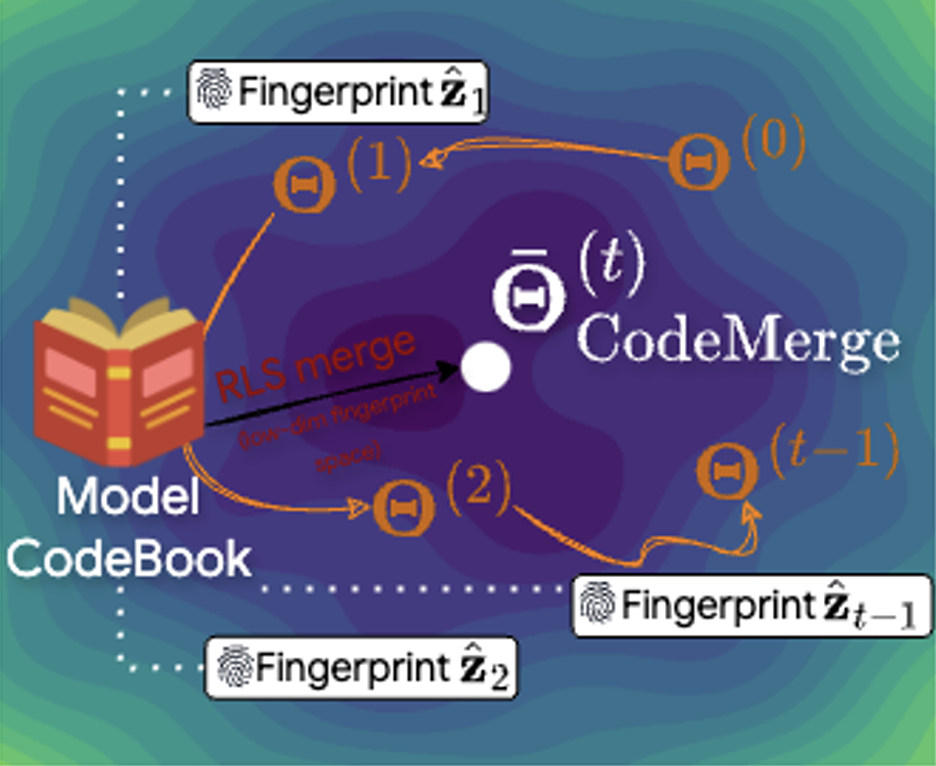
CodeMerge: Codebook-Guided Model Merging for Robust Test-Time Adaptation in Autonomous Driving
Huitong Yang, Zhuoxiao Chen, Fengyi Zhang, Zi Huang, Yadan Luo
NeurIPS 2025
[arXiv]
[code]
Maintaining robust 3D perception under dynamic and unpredictable test-time conditions remains a critical challenge for autonomous driving systems.
In this paper, we introduce CodeMerge, a lightweight and scalable model merging framework that bypasses these limitations by operating in a compact latent space.
Instead of loading full models, CodeMerge represents each checkpoint with a low-dimensional fingerprint derived from the source model's penultimate features and constructs a key-value codebook.
We compute merging coefficients using ridge leverage scores on these fingerprints, enabling efficient model composition without compromising adaptation quality.
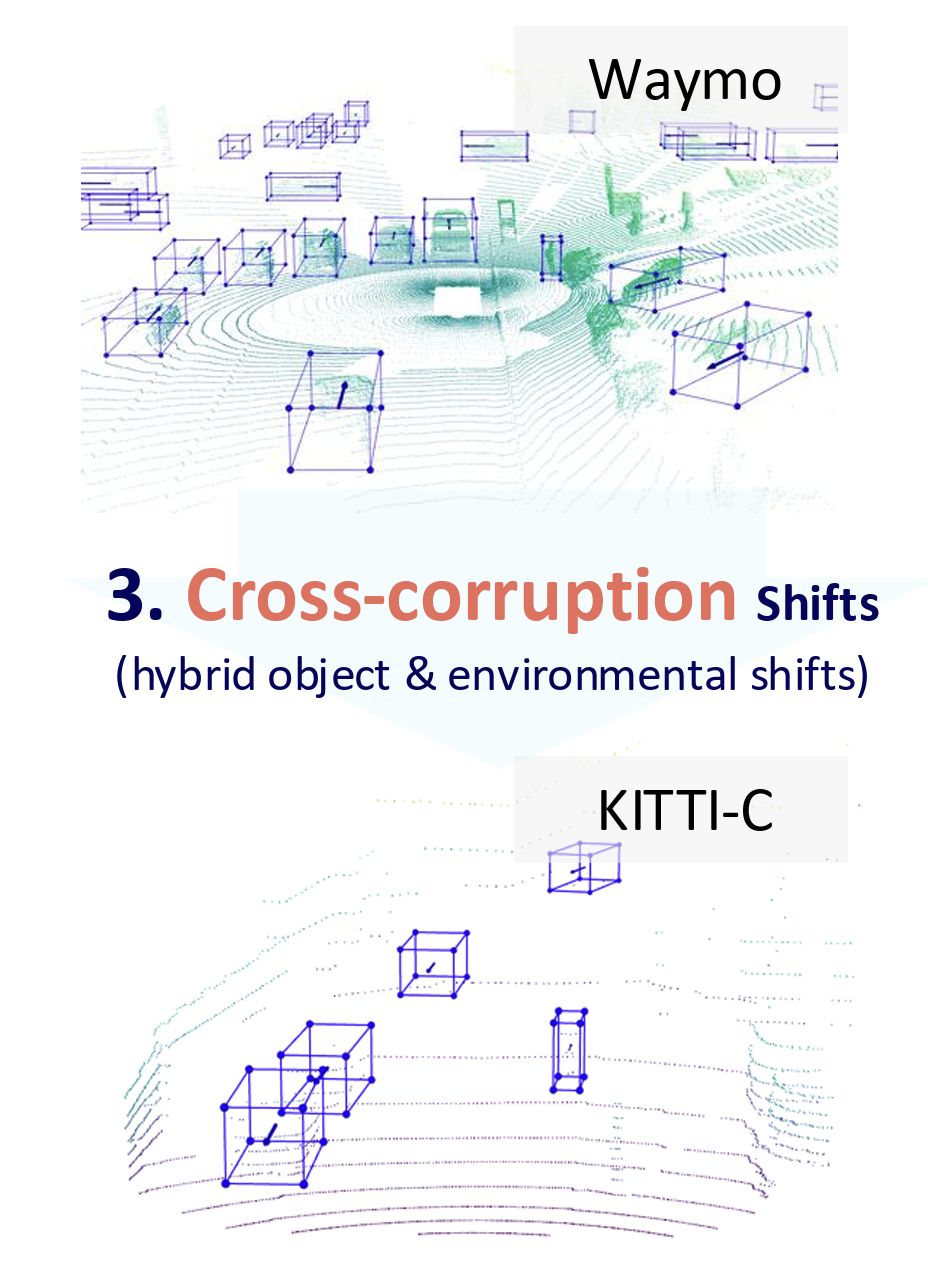
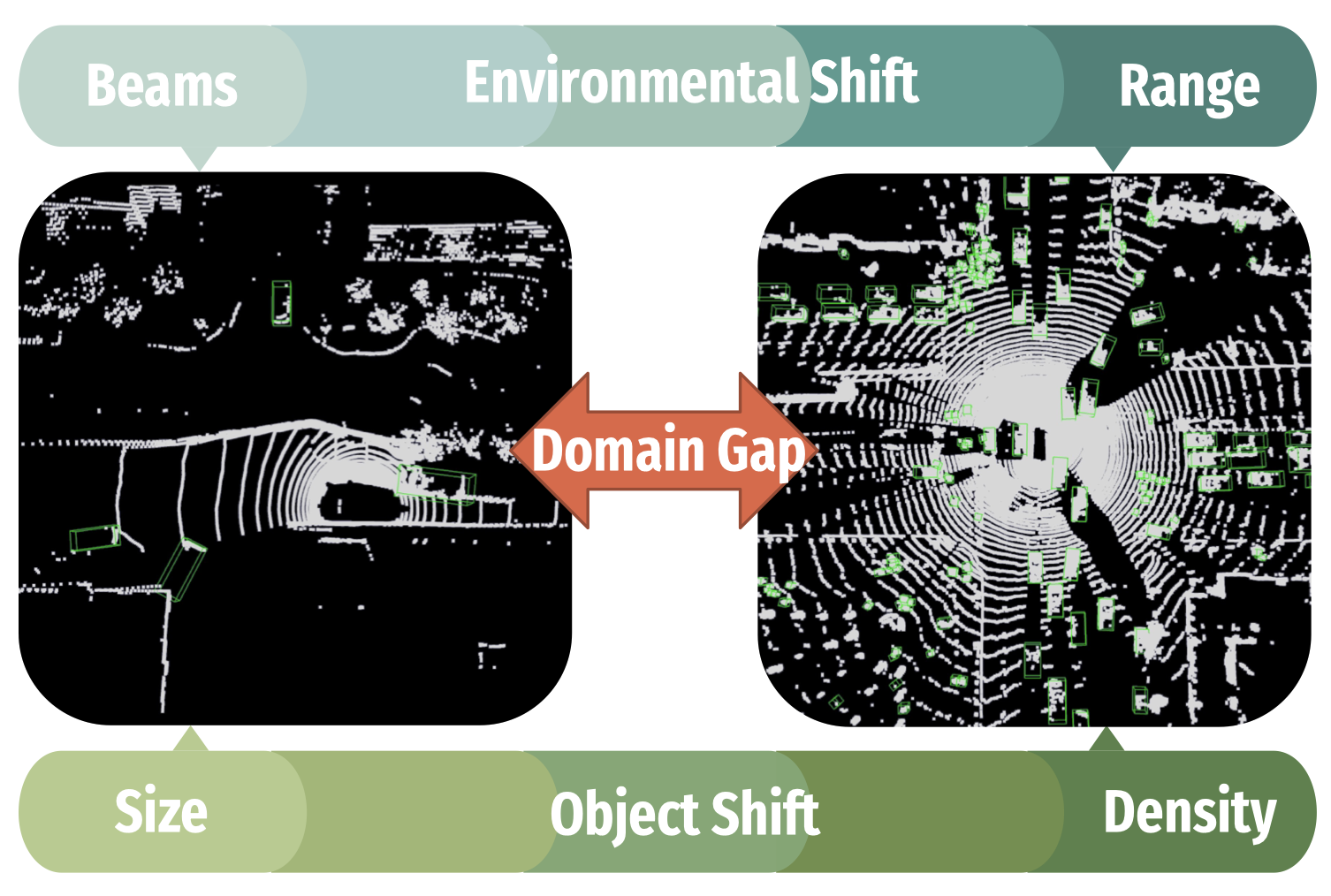
MOS: Model Synergy for Test-Time Adaptation on LiDAR-Based 3D Object Detection
Zhuoxiao Chen, Junjie Meng, Mahsa Baktashmotlagh, Yonggang Zhang, Zi Huang, Yadan Luo
ICLR 2025 (Oral)
[OpenReview]
[arXiv]
[code]
LiDAR-based 3D object detection is crucial for various applications but often experiences performance degradation in real-world deployments due to
domain shifts. While most studies focus on cross-dataset shifts, such as changes
in environments and object geometries, practical corruptions from sensor variations and
weather conditions remain underexplored. In this work, we propose a novel online test-time
adaptation framework for 3D detectors that effectively tackles these shifts,
including a challenging cross-corruption scenario where cross-dataset shifts and
corruptions co-occur. By leveraging long-term knowledge from previous test batches,
our approach mitigates catastrophic forgetting and adapts effectively to diverse shifts.
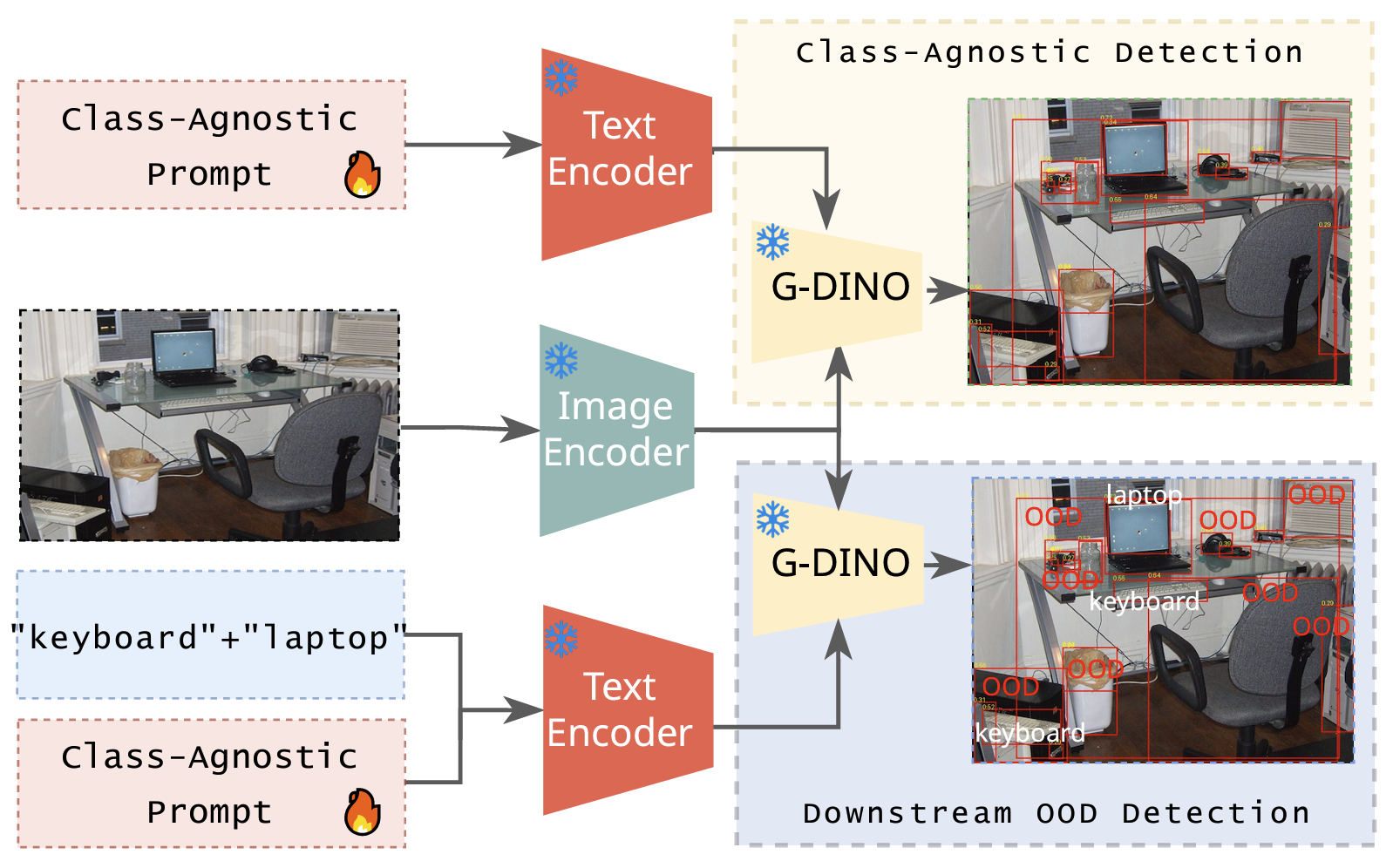
DiPEx: Dispersing Prompt Expansion for Class-Agnostic Object Detection
Jia Syuen Lim*, Zhuoxiao Chen*, Mahsa Baktashmotlagh, Zhi Chen, Xin Yu, Zi Huang, Yadan Luo
NeurIPS 2024
[OpenReview]
[arXiv]
[code]
Class-agnostic object detection (OD) can be a cornerstone or a bottleneck for many downstream vision tasks.
Despite considerable advancements in bottom-up and multi-object discovery methods that leverage basic visual cues to
identify salient objects, consistently achieving a high recall rate remains difficult due to the diversity of object types and
their contextual complexity.
In this work, we investigate using vision-language models (VLMs) to enhance object detection via a self-supervised prompt learning strategy.
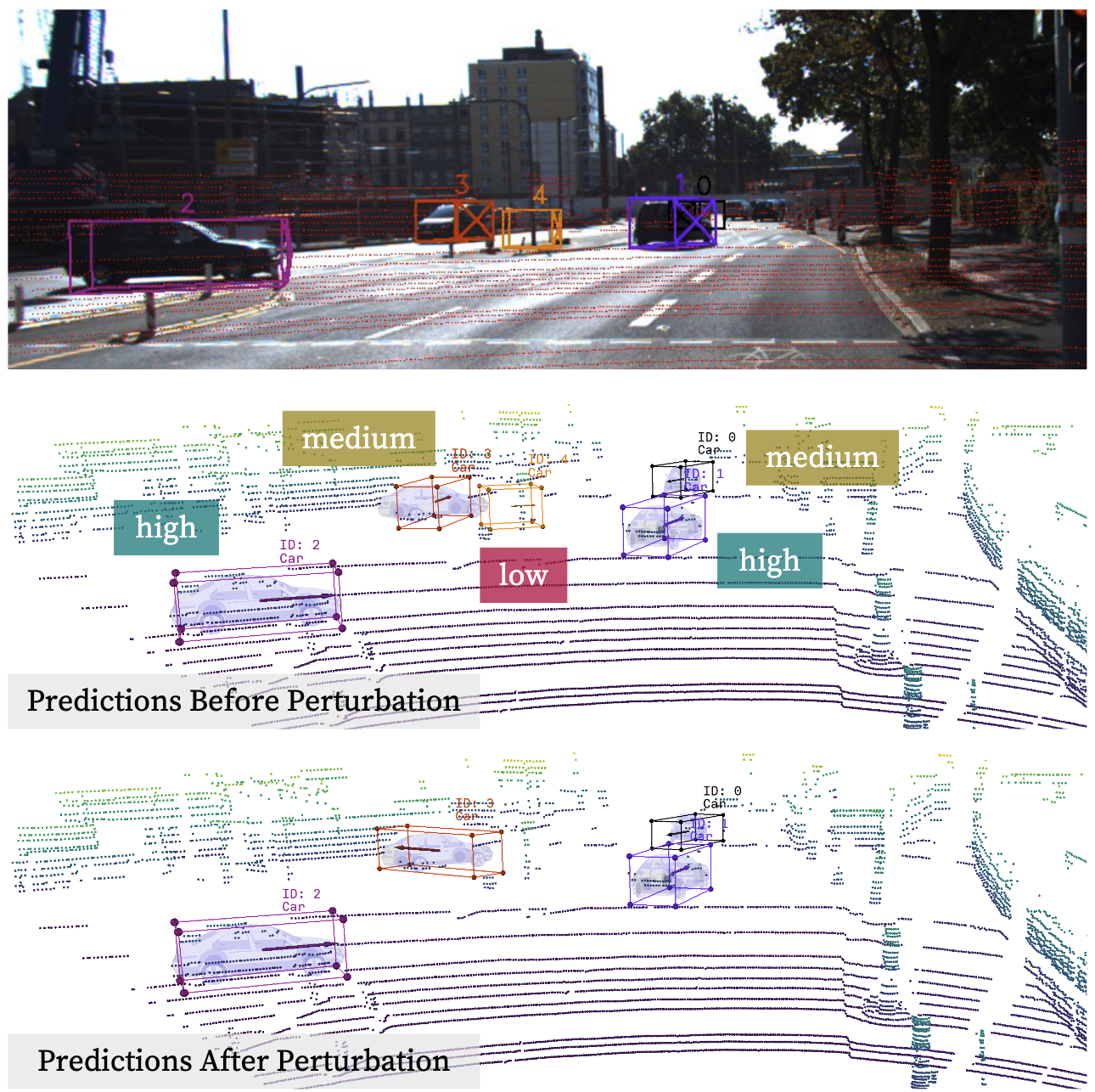
DPO: Dual-Perturbation Optimization for Test-time Adaptation in 3D Object Detection
Zhuoxiao Chen*, Zixin Wang*, Sen Wang, Zi Huang, Yadan Luo
MM 2024
[paper]
[OpenReview]
[arXiv]
[code]
We propose dual-perturbation optimization (DPO) for Test-Time Adaptation for 3D Object Detection (TTA-3OD).
We minimize the sharpness to cultivate a flat loss landscape to ensure model resiliency to minor data variations,
thereby enhancing the generalization of the adaptation process.
To fully capture the inherent variability of the test point clouds,
we further introduce adversarial perturbation to the input BEV features to better simulate the noisy test environment.
As the dual perturbation strategy relies on trustworthy supervision signals,
we utilize a reliable Hungarian matcher to filter out pseudo-labels sensitive to perturbations.
Additionally, we introduce early Hungarian cutoff to avoid error accumulation from incorrect pseudo-labels by halting the adaptation process.
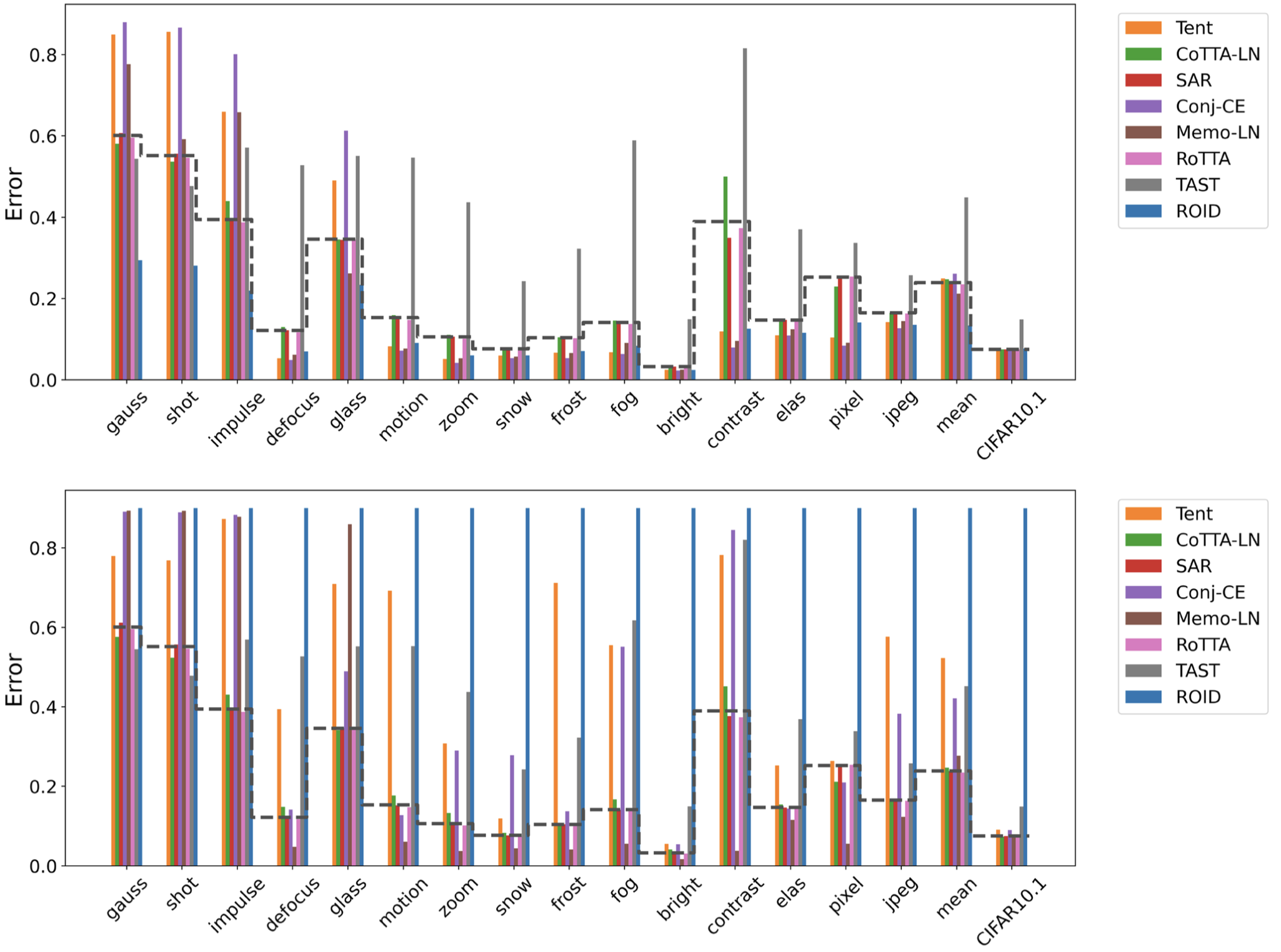
In Search of Lost Online Test-Time Adaptation: A Survey
Zixin Wang, Yadan Luo, Liang Zheng, Zhuoxiao Chen, Sen Wang, Zi Huang
IJCV 2024
[paper]
[arXiv]
[code]
This article presents a comprehensive survey of online test-time adaptation (OTTA),
focusing on effectively adapting machine learning models to distributionally different target data upon batch arrival.
Despite the recent proliferation of OTTA methods, conclusions from previous studies are inconsistent due to ambiguous settings,
outdated backbones, and inconsistent hyperparameter tuning, which obscure core challenges and hinder reproducibility.
Revisiting Domain-Adaptive 3D Object Detection by Reliable, Diverse and Class-balanced Pseudo-Labeling
Zhuoxiao Chen, Yadan Luo, Zi Huang, Zheng Wang, Mahsa Baktashmotlagh
ICCV 2023
[paper]
[code]
[video]
Unsupervised domain adaptation (DA) with the aid of pseudo labeling techniques has emerged as a crucial approach for domain-adaptive 3D object detection.
While effective, existing DA methods suffer from a substantial drop in performance when applied to a multi-class training setting,
due to the co-existence of low-quality pseudo labels and class imbalance issues.
In this paper, we address this challenge by proposing a novel ReDB framework tailored for learning to detect all classes at once.
Our approach produces Reliable, Diverse, and class-Balanced pseudo 3D boxes to iteratively guide the self-training on a distributionally
different target domain.
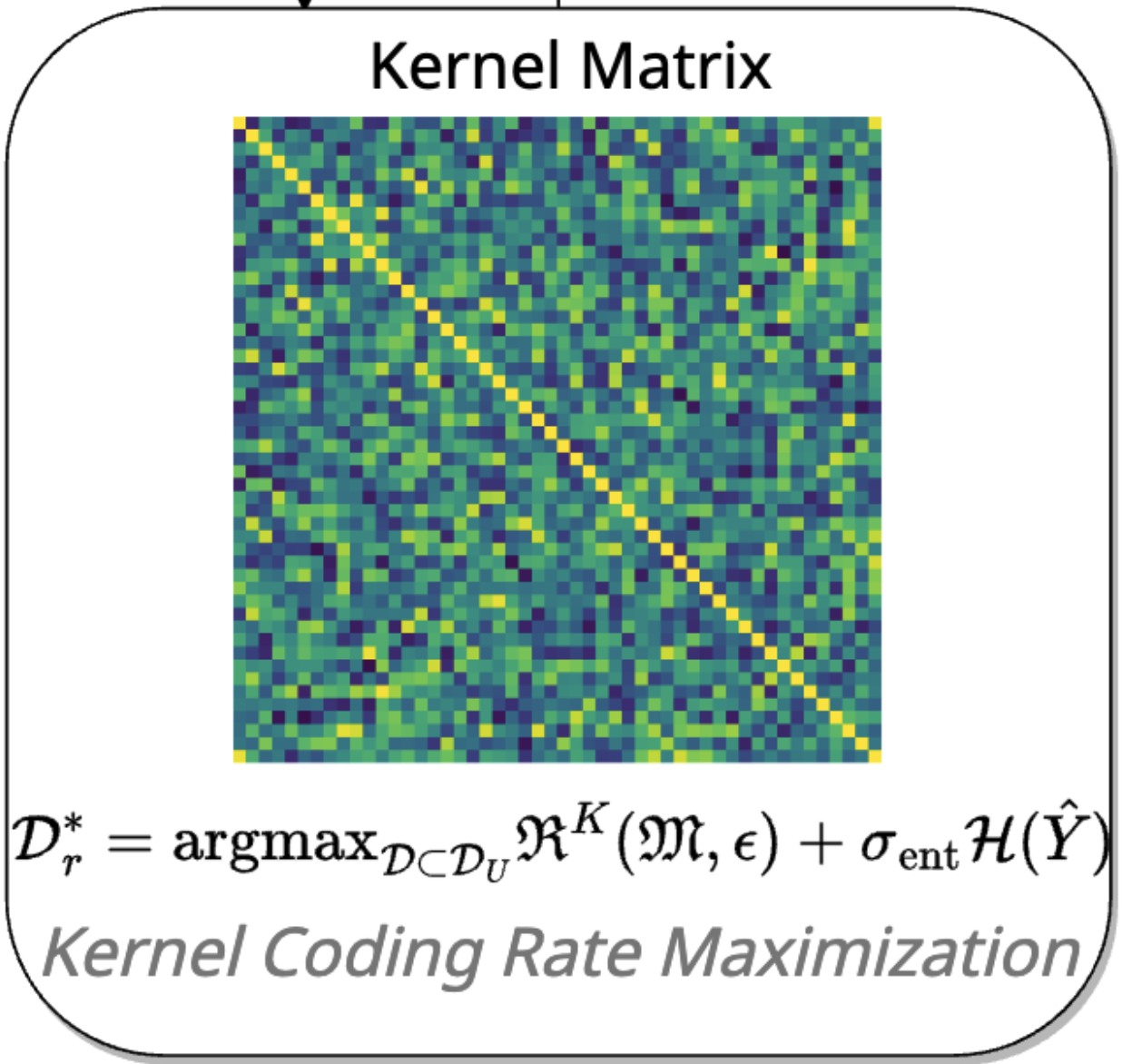
KECOR: Kernel Coding Rate Maximization for Active 3D Object Detection
Yadan Luo, Zhuoxiao Chen, Zhen Fang, Zheng Zhang, Zi Huang, Mahsa Baktashmotlagh
ICCV 2023
[paper]
[code]
Active learning (AL) seeks to mitigate the annotation burden through algorithms that use fewer labels and can attain performance comparable to fully supervised learning.
Although AL has shown promise, current approaches prioritize the selection of unlabeled point clouds with high aleatoric and/or epistemic uncertainty,
leading to the selection of more instances for labeling and reduced computational efficiency.
In this paper, we resort to a novel kernel coding rate maximization (KECOR) strategy which aims to identify the most informative point clouds to acquire labels
through the lens of information theory.
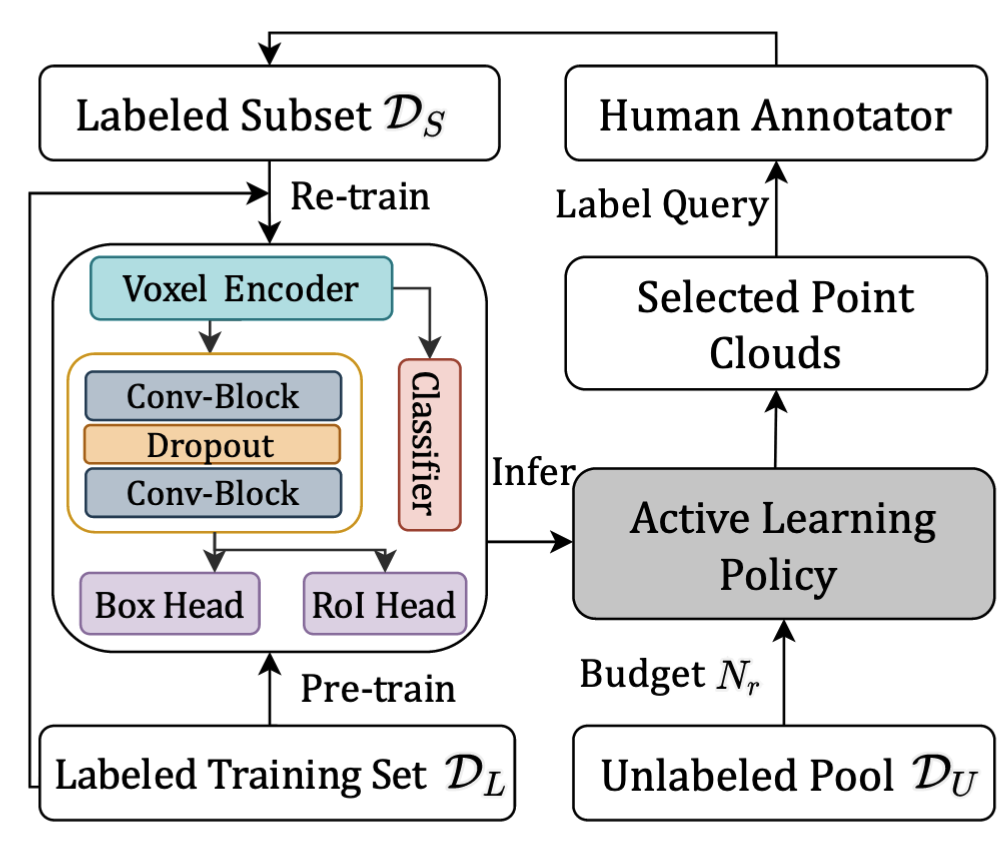
Exploring Active 3D Object Detection from a Generalization Perspective
Yadan Luo*, Zhuoxiao Chen*, Zijian Wang, Xin Yu, Zi Huang, Mahsa Baktashmotlagh
ICLR 2023 (Spotlight)
[OpenReview]
[code]
To alleviate the high annotation cost in LiDAR-based 3D object detection,
active learning is a promising solution that learns to select only a small portion of unlabeled data to annotate,
without compromising model performance. We jointly investigate three novel criteria in our framework CRB for point cloud acquisition - label conciseness, feature representativeness and
geometric balance, which hierarchically filters out the point clouds of redundant 3D bounding box labels, latent features and geometric characteristics (e.g., point cloud density)
from the unlabeled sample pool and greedily selects informative ones with fewer objects to annotate.
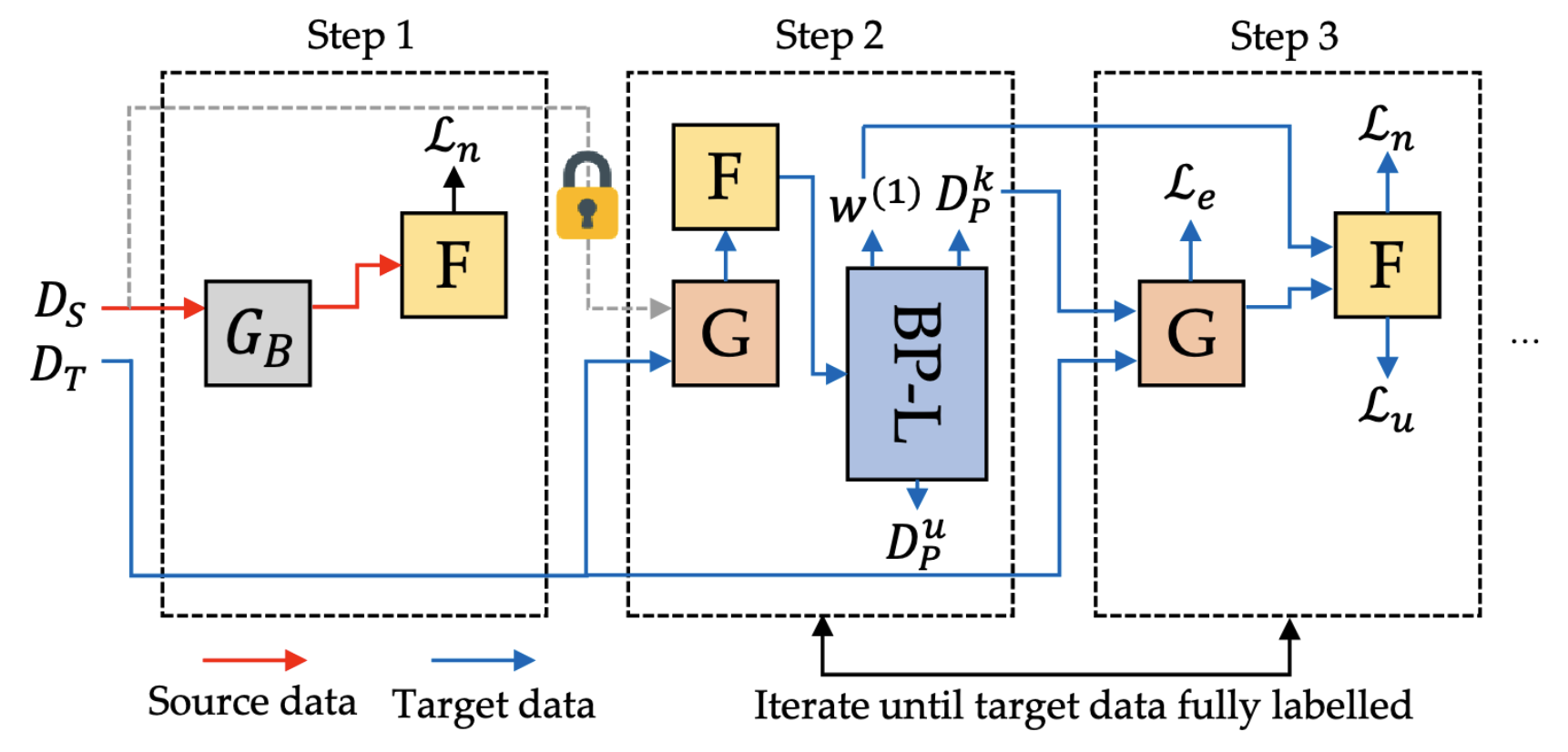
Source-Free Progressive Graph Learning for Open-Set Domain Adaptation
Yadan Luo, Zijian Wang, Zhuoxiao Chen, Zi Huang, Mahsa Baktashmotlagh
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)
[paper]
[code]
We propose a Progressive Graph Learning (PGL) framework that decomposes the target hypothesis space into the shared and unknown subspaces, and then progressively pseudo-labels the most confident known samples from the target domain for
hypothesis adaptation.
Research Services
I serve as a reviewer for the following top conferences:and top journals: